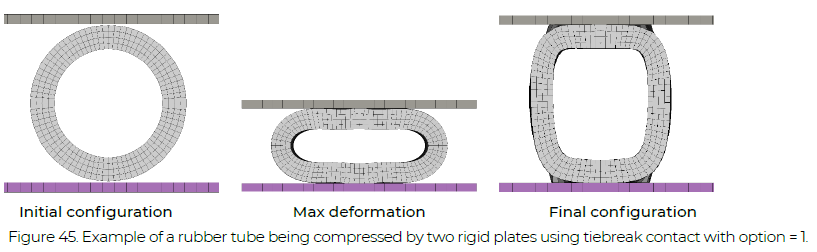
An example of *CONTACT_AUTOMATIC_SURFACE_TO_SURFACE_TIEBREAK_ID is supplied as sticking_contact.key. A rubber tube is compressed between two rigid plates. When the plates are brought back to their original position, the rubber tube remains attached to the plates, see Figure 45.
Example Files: sticking_contact
NOTE! All examples are included in the Complete Guideline
*KEYWORD
$===============================================================================
$ Geometry
$===============================================================================
*INCLUDE
sticking_contact_geo.key
$ --- move some parts to close contact gaps
*SET_NODE_GENERAL
$# sid da1 da2 da3 da4 solver
23 0.000 0.000 0.000 0.000
$# option e1 e2 e3 e4 e5 e6 e7
PART 3
*SET_NODE_GENERAL
$# sid da1 da2 da3 da4 solver
24 0.000 0.000 0.000 0.000
$# option e1 e2 e3 e4 e5 e6 e7
PART 5
*DEFINE_TRANSFORMATION
$# tranid
11
$# option a1 a2 a3 a4 a5 a6 a7
TRANSL 0.000 0.110000 0.000 0.000 0.000 0.000 0.000
*DEFINE_TRANSFORMATION
$# tranid
12
$# option a1 a2 a3 a4 a5 a6 a7
TRANSL 0.000 -0.110000 0.000 0.000 0.000 0.000 0.000
*NODE_TRANSFORM
$# trsid nsid
11 23
12 24
$===============================================================================
$ Control and output cards
$===============================================================================
*INCLUDE
../INCLUDE_FILES/control_cards_nonlin.key
*INCLUDE
../INCLUDE_FILES/database_cards_static.key
*CONTROL_TERMINATION
2.4
*DEFINE_CURVE_TITLE
Time stepping curve
700,
0.,0.05
1.,0.15
2.,0.1
2.4,0.05
10.,0.05
*CONTROL_MPP_IO_NODUMP
$===============================================================================
$ Contacts
$===============================================================================
*SET_PART_LIST_TITLE
Master for tiebreak contact
19000111
3 5
*SET_PART_LIST_TITLE
Slave for tiebreak contact
19000102
1
*CONTACT_AUTOMATIC_SURFACE_TO_SURFACE_TIEBREAK_ID
$# cid title
1Autmatic surface to surface tiebreak
$# ssid msid sstyp mstyp sboxid mboxid spr mpr
19000102 19000111 2 2 1 1
$# fs fd dc vc vdc penchk bt dt
0.1
$# sfs sfm sst mst sfst sfmt fsf vsf
$# option nfls sfls param eraten erates ct2cn cn
1
$# soft sofscl lcidab maxpar sbopt depth bsort frcfrq
$# penmax
$# igap
2
*CONTACT_AUTOMATIC_SURFACE_TO_SURFACE_MORTAR_ID
$# cid title
2Autmatic surface to surface mortar
$# ssid msid sstyp mstyp sboxid mboxid spr mpr
19000102 19000111 2 2 1 1
$# fs fd dc vc vdc penchk bt dt
$# sfs sfm sst mst sfst sfmt fsf vsf
$#
$===============================================================================
$ Loads and boundary conditions
$===============================================================================
*DEFINE_CURVE_TITLE
Zero curve
19000001
0.,0.
100.,0.
*DEFINE_CURVE_TITLE
Top plate motion
19000002
0.,0.
2.,-10.6
2.4,0.
3., 0.
*BOUNDARY_PRESCRIBED_MOTION_RIGID
3 2 2 19000002
5 2 2 19000001
$===============================================================================
$ Simulation title
$===============================================================================
*TITLE
180122, Tiebreak contact example w. rubber tube + extra mortar contact
*END