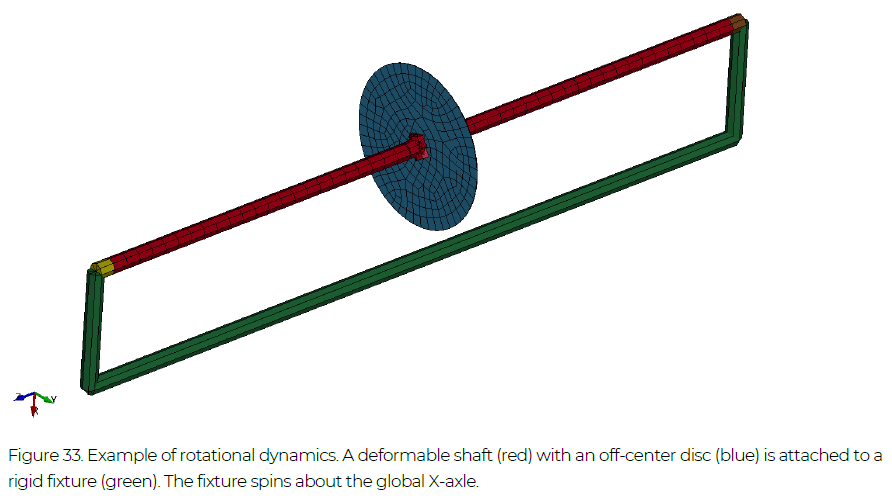
A disk is attached slightly off-center to a rotating shaft (omega = 200). The shaft is attached to a rigid fixture, see Figure 33. The fixture in turn is spinning around the X-axle. The rotational axis of the shaft is defined using *DEFINE_VECTOR_NODES and two nodes in the rotating fixture. A rotating coordinate system is applied for the rotational dynamics analysis.
The keyword file for this example is run_rotodyn.key. The analysis is performed using non-linear transient dynamics (compare Section 4.8) and the control cards of control_cards_nolin.key. To
account for the rotational motion, the composite Bathe time integration scheme is used (ALPHA = 0.5 on *CONTROL_IMPLICIT_DYNAMICS), compare Section 4.8.
Example Files: run_rotodyn
NOTE! All examples are included in the Complete Guideline
*KEYWORD
$===============================================================================
$ Control cards
$===============================================================================
*INCLUDE
../INCLUDE_FILES/control_cards_nonlin.key
*INCLUDE
../INCLUDE_FILES/database_cards_static.key
*CONTROL_IMPLICIT_GENERAL
$# imflag dt0 imform nsbs igs cnstn form zero_v
1 1.000e-3 2 1
*CONTROL_IMPLICIT_DYNAMICS
$# imass gamma beta tdybir tdydth tdybur irate
1 1 0.5
*CONTROL_IMPLICIT_AUTO
$ IAUTO ITEOPT ITEWIN DTMIN DTMAX DTEXP
1 100 20 1.E-6 -700. 0.
*CONTROL_IMPLICIT_SOLUTION
$# nsolvr ilimit maxref dctol ectol rctol lstol abstol
12 1 65 1.E-3 1.E-2 1.E-20
$# dnorm diverg istif nlprint nlnorm d3itctl
1 1 1 3 2 1
$# arcctl arcdir arclen arcmth arcdmp
$# lsmtd
5
*DEFINE_CURVE_TITLE
Implicit timesteps
700,
0.,1.E-4
1.,1.E-3
*CONTROL_TERMINATION
$# endtim endcyc dtmin endeng endmas
0.100000 0 1.E-6
*CONTROL_MPP_IO_NODUMP
$===============================================================================
$ Database cards
$===============================================================================
*DATABASE_BINARY_D3PLOT
$# dt lcdt beam npltc psetid
1.000e-3 0 0 0 0
*SET_NODE_LIST_TITLE
output nodes
$# sid da1 da2 da3 da4 solver
1
$# nid1 nid2 nid3 nid4 nid5 nid6 nid7 nid8
1 51
*DATABASE_HISTORY_NODE_SET
1
$===============================================================================
$ Loads and boundary conditions
$===============================================================================
*CONTROL_IMPLICIT_ROTATIONAL_DYNAMICS
$---+----1----+----2----+----3----+----4----+----5----+----6----+----7----+----8
$# sid itype omega vid nomega irefer
1 1 200.00 1 0 2
*DEFINE_VECTOR_NODES
1 1 51
*SET_PART_LIST_TITLE
Rotating parts
$# sid da1 da2 da3 da4 solver
1
$# pid1 pid2 pid3 pid4 pid5 pid6 pid7 pid8
1 2
*BOUNDARY_PRESCRIBED_MOTION_RIGID
3 5 2 110
*DEFINE_CURVE_TITLE
Rotational displacement 1 rad in 0.1 s
110
0.,0.
0.1,1.
1.,1.
$===============================================================================
$ Geometry
$===============================================================================
*INCLUDE
geo_rotodyn.key
$===============================================================================
$ Simulation title
$===============================================================================
*TITLE
Rotational dynamics example - nonlinear transient implict dynamic
*END